

Our Research
which leads us to the development of multipurpose robotic avatars.
Below are highlights of our ongoing research.
GerminatorBot-19
Design and development of a social robot for fostering cooperation with COVID-19 public health measures.
This project will study the efficacy of GerminatorBot-19 for fostering cooperation with COVID-19 health measures in KSU students and secondary (middle and high school) students. The COVID-19 health measures will include mask-wearing, proper hygiene (e.g., using hand sanitizer and disinfecting high-touch surfaces like mobile phones and computer keyboards), and daily health checks (e.g., temperatures and symptom checklists)
…


Smart Trashcan Jr.
Robots Teaching Recycling: Towards Improving Environmental Literacy of Children
The present pollution problem can be partially attributed to the lack of empathy for learning any ecological and environmental literacy skills. Although the use of robotics in education is increasing, there has been a surprisingly lack of interest towards developing devices designed to teach children how to be environmentally conscious, and in particular, how to recycle. This gap is the basis for our robot, which we call the Smart Trash Junior, a mechatronic trashcan that uses vision recognition to identify recyclable objects and enters into a dialogue that educates children, within elementary schools, how
to recycle.
…
Smart Devices and IoT
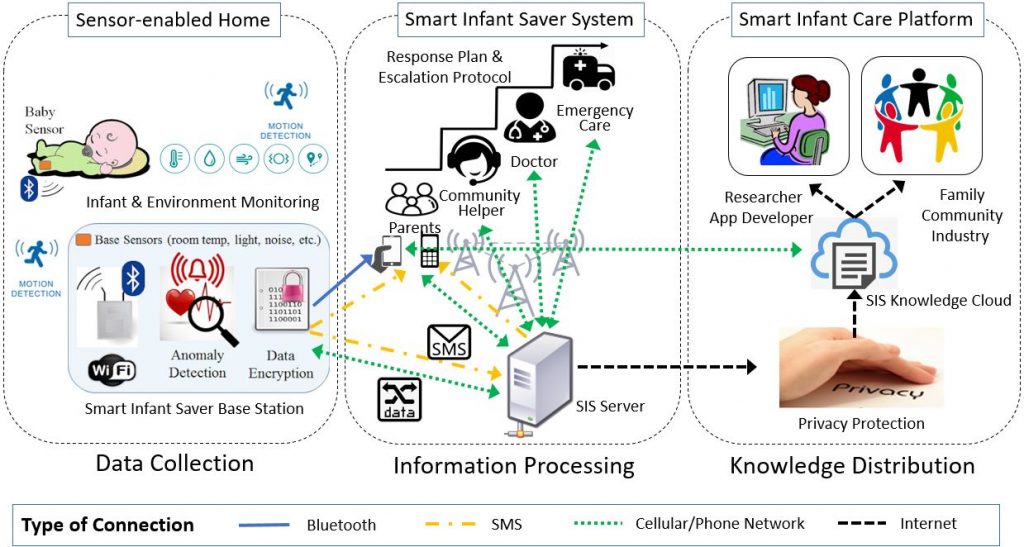
Smart Infant Saver (SIS) Project
This project is pursuing under the core belief that as a collective, the world can achieve a future where the rate of sudden unexpected infant deaths can be greatly reduced and the uncertainty behind this syndrome vanished or minimized.
…
ISHA
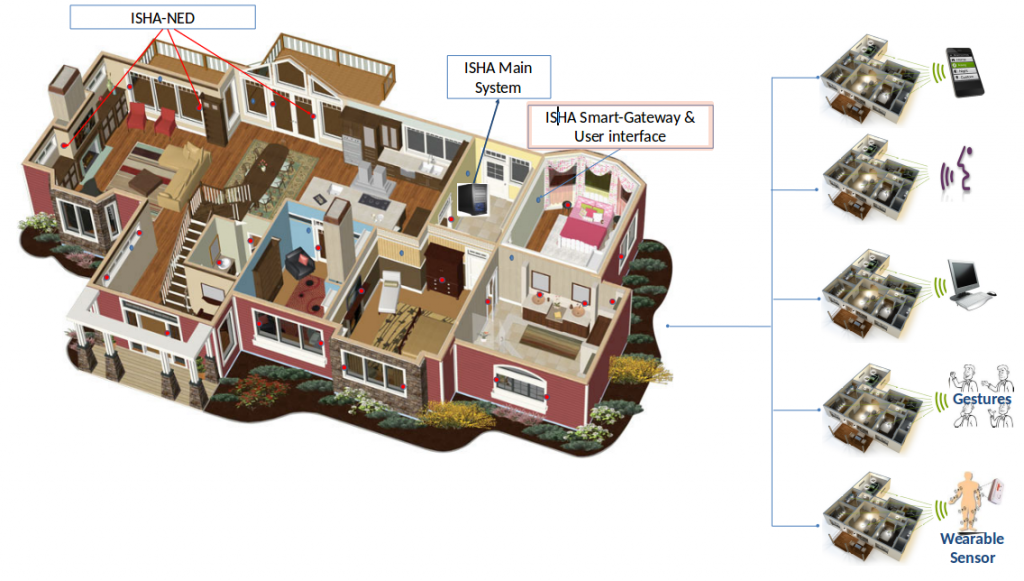
Smart Home is the emerging technology in home automation, which is flexible, secure, and user friendly. Intelligent System for Home Automation (ISHA) enables to develop and implement smart home systems that can be remotely controlled from anywhere with gestures, voice commands, and smart devices. ISHA makes intelligent inferences based on user preferences, needs, and spatial, temporal and energy contexts.
ISHA Main Server (ISHA-MS)
ISHA Smart Gateway (ISHA-SG)
Network Enable Device (ISHA-NED)
User Interface
Physical Experiences
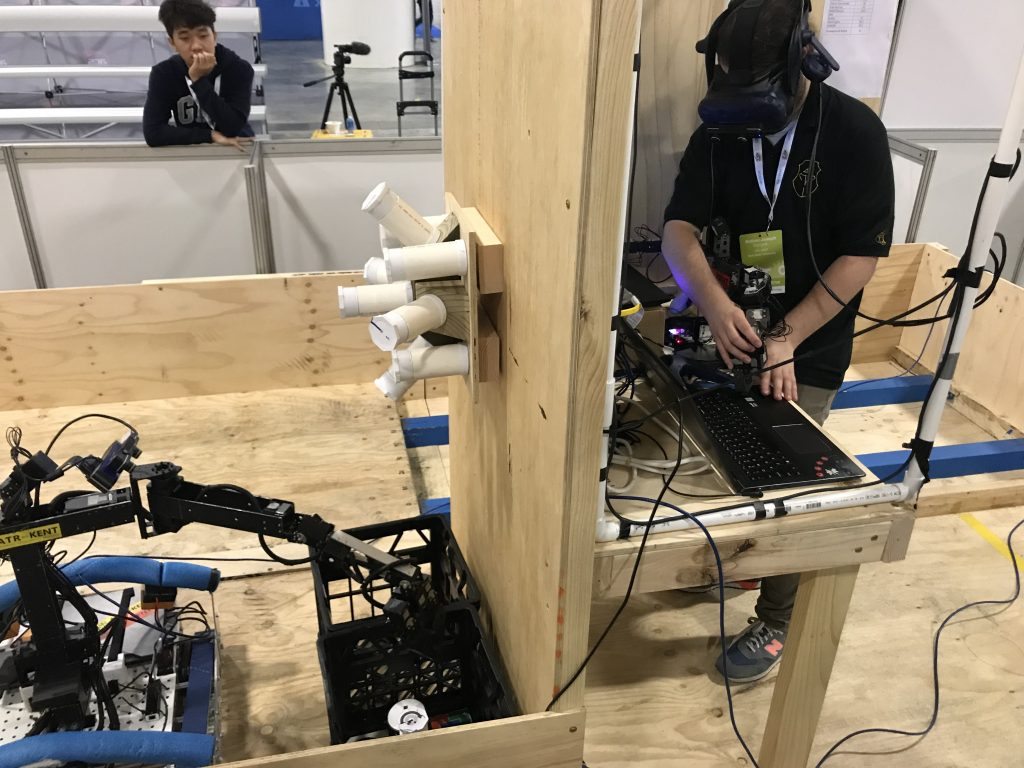
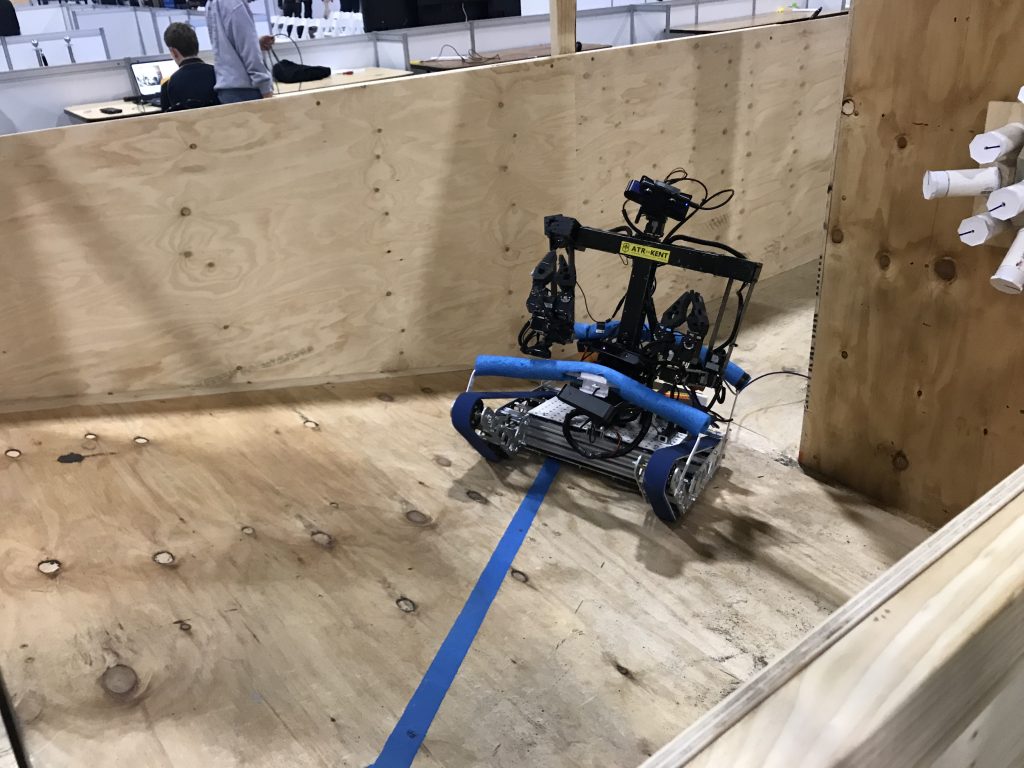
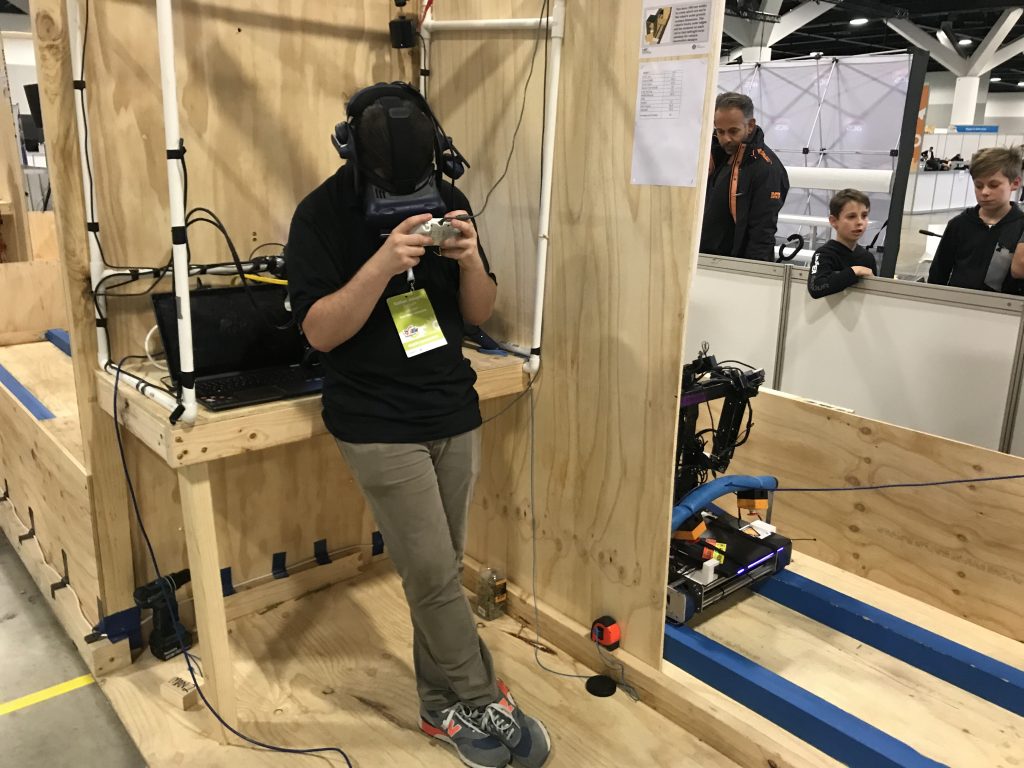
Urban Search & Rescue Avatar
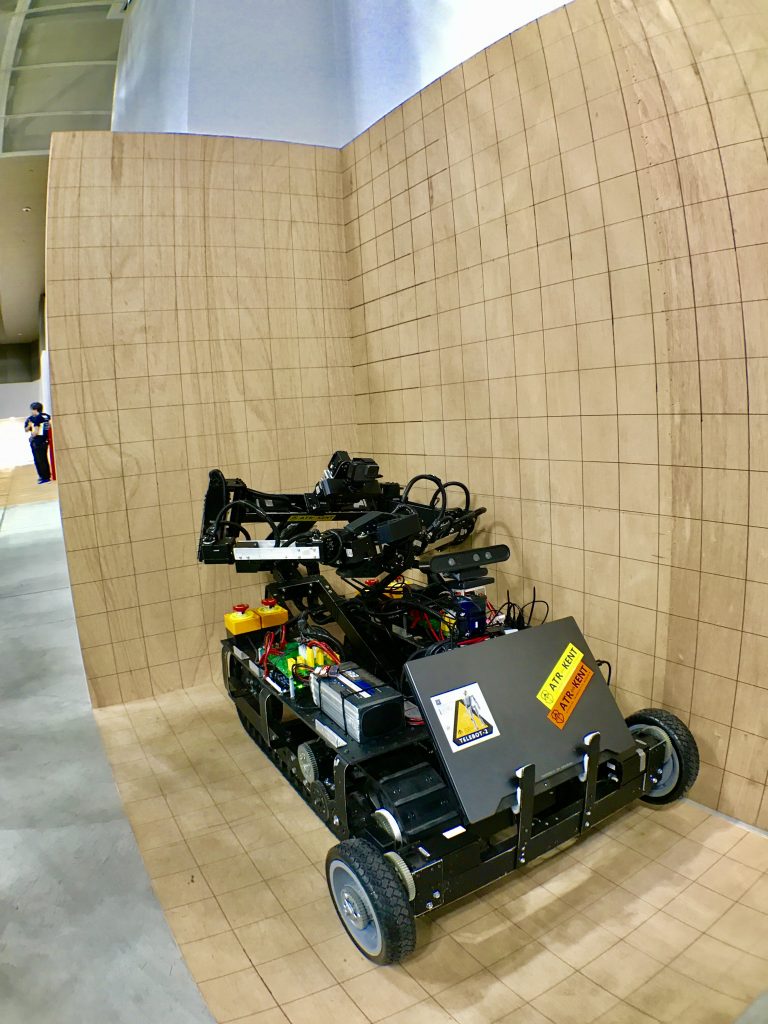
Telebot-2 for Urban Search & Rescue (USAR) is one of the latest developments from the ATR Lab. Development of this robot began at the end of March 2018, and was used during the World Robot Summit 2018 in Tokyo, Japan.
Telebot-2 USAR is humanoid telepresence “transformer” robot, equipped with a dual-strategy locomotion system that allows it to apply and differential and track-based locomotion.

Multi-purpose Avatar
Telebot-2 for Urban Search & Rescue (USAR) is one of the latest developments from the ATR Lab. Development of this robot began at the end of March 2018, and was used during the World Robot Summit 2018 in Tokyo, Japan.
Telebot-2 USAR is humanoid telepresence “transformer” robot, equipped with a dual-strategy locomotion system that allows it to apply and differential and track-based locomotion.
Immersifly
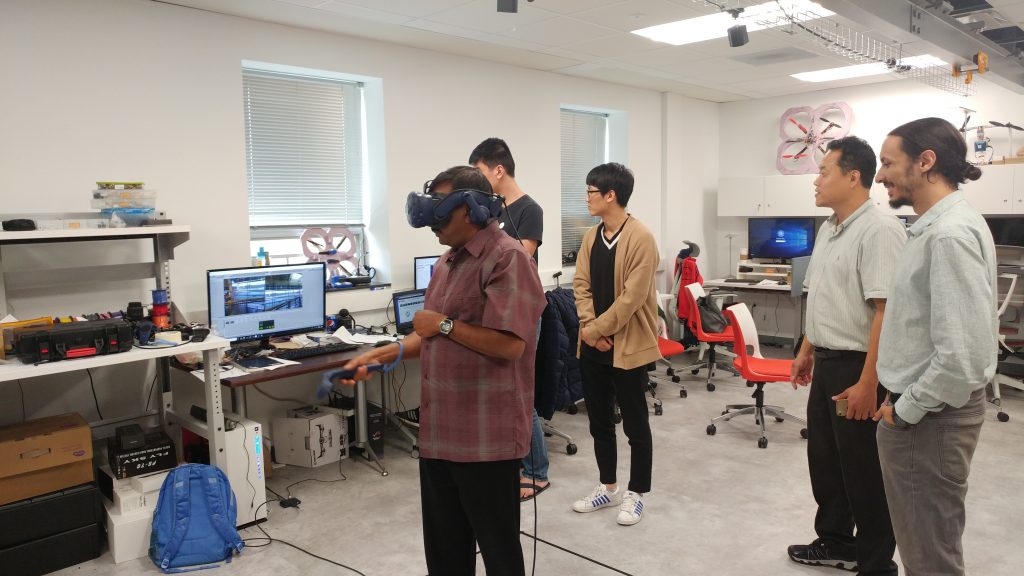
Exploring the development of an affordable, immersive, flight simulator. Current development of the system includes integration with unmanned aerial vehicles and the use case of immersive drone racing. All hardware and software is being open-sourced along with design documents of the system.


Virtual Experiences
This project creates a virtual reality tour experience that helps users become familiar with a place and acquire high detailed information about said place before visiting. In addition to that, in the cases of something like a museum, or other places that are not easily accessible to people with disabilities, the tour provides a realistic experience comparable to actually visiting the place yourself, from the comfort of your home, with all the details of the environment shown appropriately in the VR experience. This project is also aimed at helping people who are intellectually disabled and those who have a hard time with social interactions to get familiar with a place like a college campus or a gym/recreational center before visiting. This will minimize their stress levels about going to a new place and also making it so that they don’t have to put themselves in stressful social situations. Our implementation currently uses a hotspot based touring system built in the Unity3D engine, with 360-degree pictures used to give the user the most immersive experience possible.
Augmented Visual Control
Immersive and Intuitive Interface
Smart Guiding System
Other
Multi-disciplinary
The Advanced Telerobotics Research lab houses a group of interdisciplinary researchers, with experience in various fields such as Computer Science, Electrical Engineering, Mechatronics, Artificial Intelligence, Biomedical Engineering, Philosophy and others.
Other research areas:
1
Virtual Reality
VR Flight Simulator
2
Autonomy
Indoor Self-Driving Car
3
Human Robot Interaction
Gesture-Enabled Telepresence Robot
4
Drones